实验环境
(1)硬件环境
人工智能实训平台:集成多设备控制功能的综合实验平台
机械臂:具备抓取功能的执行设备,用于夹取木块
摄像头(2个):用于采集木块图像,识别编码信息
传送带:用于输送待测木块的传输设备
带编码的木块:表面带有特定编码的待测物体
指示灯:用于提示目标木块识别状态的报警设备
计算机:用于运行控制程序和虚拟机的终端设备
(2)软件环境
Vmware虚拟环境:运行Ubuntu系统的虚拟化平台
Python 3.x 环境:支持实验代码运行的编程语言环境
OpenCV库:用于图像处理和摄像头控制的计算机视觉库
实验控制程序:"实验一:抓取指定编码.py"及相关依赖库
图形界面程序:提供摄像头控制、检测参数设置的交互界面
实验步骤
1. 准备与运行
- 准备好待测木块,确保木块表面的编码清晰可辨。
- 接通实训平台电源,确保机械臂、传送带、摄像头等设备供电正常。
- 打开计算机上的虚拟机,启动Ubuntu系统。
- 在虚拟机中运行"实验二:抓取异样编码.py"代码,等待程序初始化完成,显示如下图即可:
-
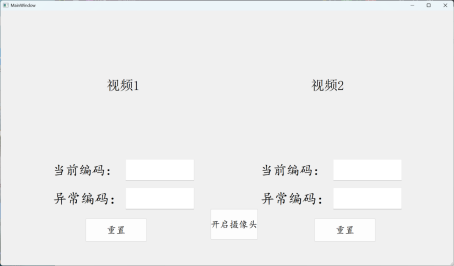
- 抓取异常编码启动页面图
2. 识别与闪灯
- 按照摄像头调试实验的方法,调试并启动两个摄像头。
- 打开传送带控制开关,使传送带进入工作状态。
- 调整摄像头安装角度,确保摄像头视角能完整拍摄到木块标签,且视频中待测木块图像清晰。
- 在程序界面点击【开启摄像头】按钮,同时启动两个摄像头,两组实时画面会分别显示在【视频1】和【视频2】窗口中,分别对应设备场景布置的两个阶段。
- (左侧摄像头为例)在程序界面点击【开启检测编码】按钮,在弹出的输入框中输入待检测的木块编码。
- 将待检测的木块放置在传送带上,等待木块随传送带进入摄像头检测区域。
-

- 已开启左右两侧摄像头
注意:右侧摄像头的操作步骤与左侧相同,主要用于不同检测阶段的图像采集,确保木块在传送过程中始终处于监控范围内。
实验结果
- 先将需要检测的小木块放置在传送带上,等待检测,再点击【开启检测编码】,输入待检测编码,等待对应编码的小木块出现。
-

- 显示各个木块对应的数字编码
- 出现对应编码的小木块时,图像会被红框框中,木块上方会显示相对应的红色编码,同时灯会闪烁。
-

- 左侧灯正在闪烁
- 机械臂夹取待检测编码木块见下图
-
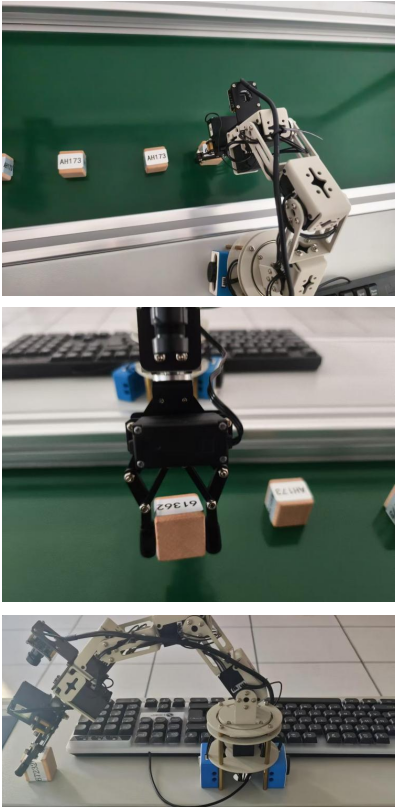
- 机械臂夹取识别到的相对应的编码木块 (从识别到抓取最后放下)