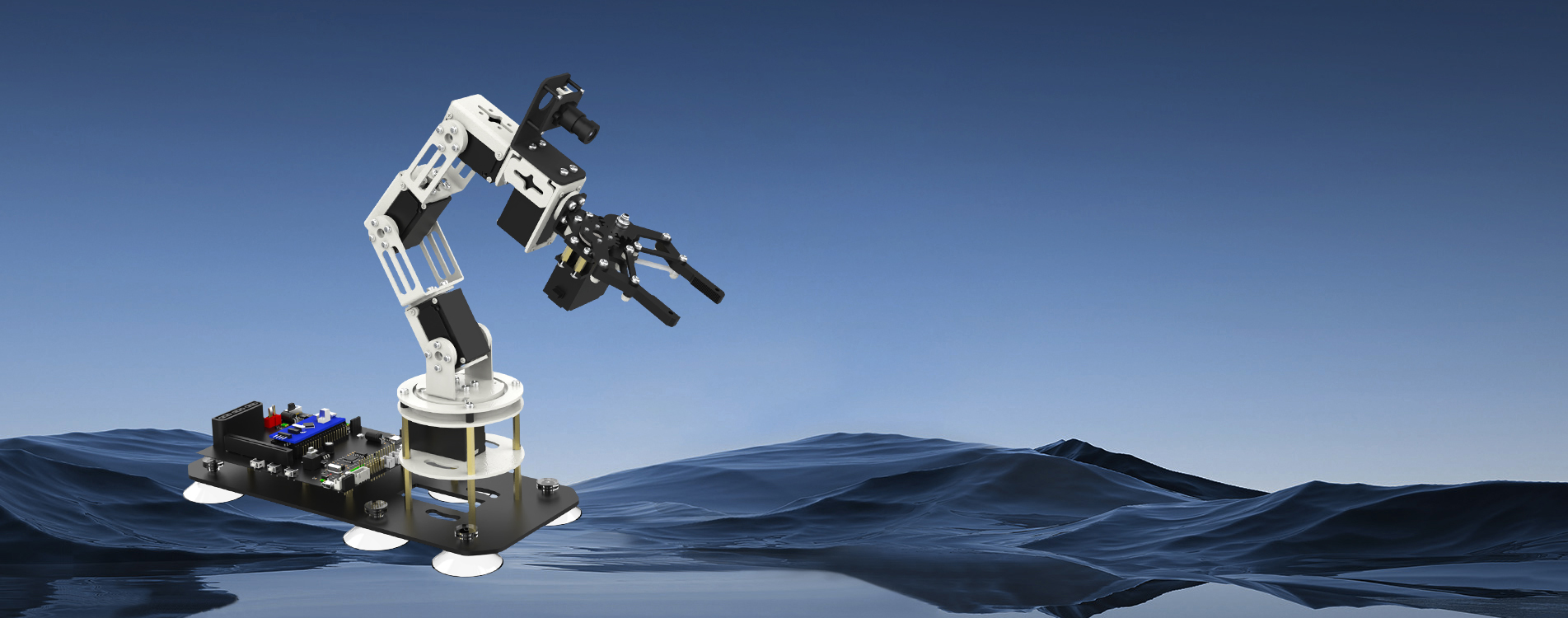
机器臂基础实验ROBOTIC ARM
理解机械臂各部件的控制原理,掌握基础编程逻辑,能独立完成单一部件控制与多部件协同操作。以下实验从 RGB 灯、蜂鸣器到多舵机协同,循序渐进完成机械臂入门实训。
实验列表 EXPERIMENTS
-
-
 01
通过编程控制机械臂扩展板上的RGB灯,循环显示红、绿、蓝三种颜色的灯光效果,旨在实践编程技能并学习如何调用API函数控制硬件。
01
通过编程控制机械臂扩展板上的RGB灯,循环显示红、绿、蓝三种颜色的灯光效果,旨在实践编程技能并学习如何调用API函数控制硬件。
- 实验一:控制RGB灯
-
-
-
 02
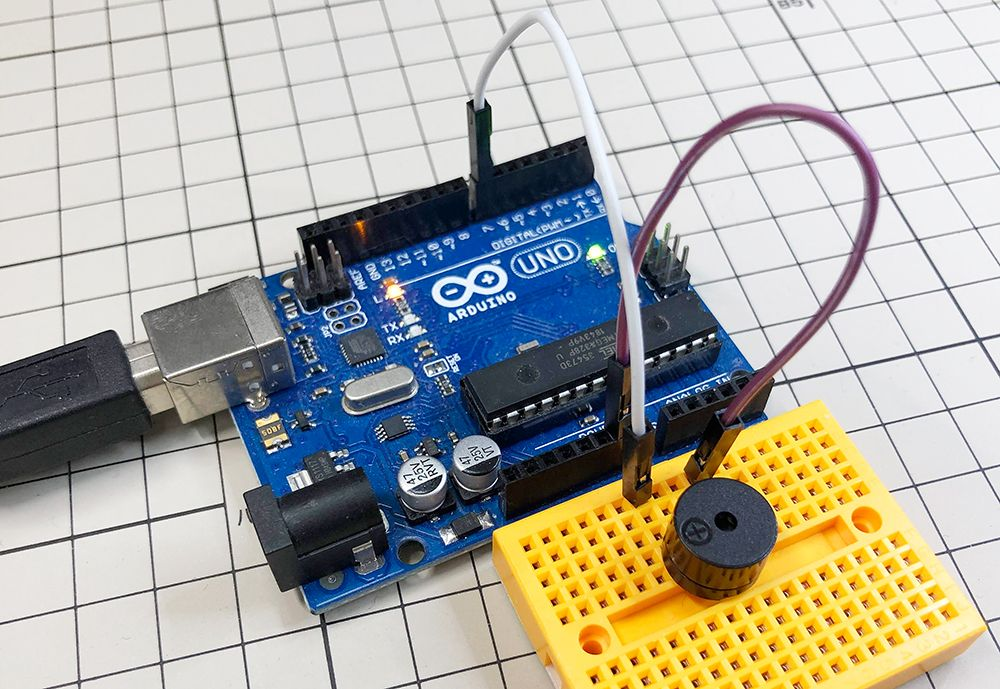
通过编程控制机械臂设备上的蜂鸣器,验证其响铃与关闭功能,并熟悉相关控制库的使用。
02
通过编程控制机械臂设备上的蜂鸣器,验证其响铃与关闭功能,并熟悉相关控制库的使用。
- 实验二:控制蜂鸣器
-
-
-
 03
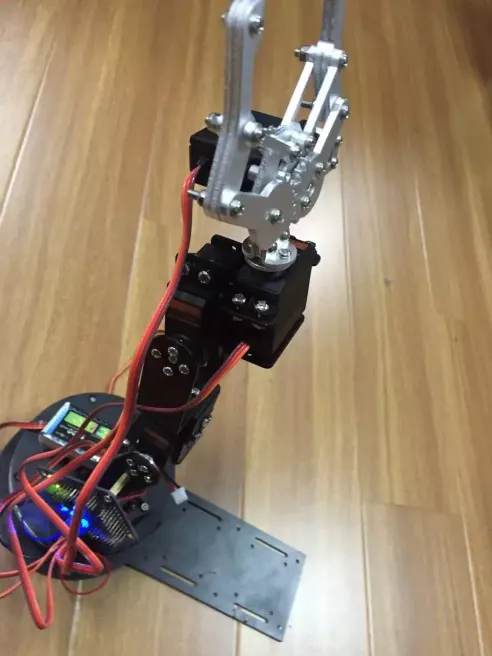
控制机械臂的单个舵机运动到指定角度并循环切换角度。
03
控制机械臂的单个舵机运动到指定角度并循环切换角度。
- 实验三:控制单个舵机
-
-
-
 04
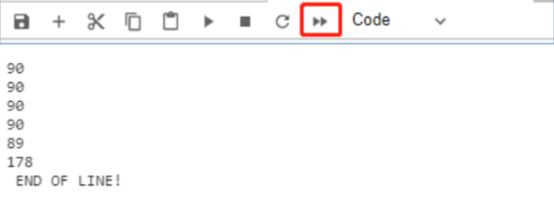
通过编程读取和控制机械臂上舵机的角度,并验证其准确性。
04
通过编程读取和控制机械臂上舵机的角度,并验证其准确性。
- 实验四:读取舵机当前位置
-
-
-
 05
实现对六舵机机械臂的协同控制,并展示其角度变化过程。
05
实现对六舵机机械臂的协同控制,并展示其角度变化过程。
- 实验五:一次控制六个舵机
-
-
-
 06
控制机械臂上下左右摆动,然后恢复到直立状态,通过同时控制3号和4号舵机的不同角度,来达到控制舵机上下摆动的功能,然后控制1号舵机左右摆动,最后再回归直立状态。
06
控制机械臂上下左右摆动,然后恢复到直立状态,通过同时控制3号和4号舵机的不同角度,来达到控制舵机上下摆动的功能,然后控制1号舵机左右摆动,最后再回归直立状态。
- 实验六:机械臂上下左右摆动
-
-
-
 07
控制机械臂跳舞,通过修改机械臂不同舵机的角度,并且增加延迟时间,从而做到类似机械臂跳舞的效果。
07
控制机械臂跳舞,通过修改机械臂不同舵机的角度,并且增加延迟时间,从而做到类似机械臂跳舞的效果。
- 实验七:机械臂跳舞
-